Volumetric Cloud
概述
一个使用Ray Marching方法的体积云算法
- 对云进行建模,使用噪声模拟云的形状
- 使用Ray Marching方法采样噪声纹理,在屏幕空间中渲染体积云的效果
云的建模
我们期望得到一个函数,这个函数描述了空间中任意位置的云密度:
float sample_cloud_density(float3 position)
3D噪声
为了描述云的形状,我们首先需要使用3D噪声模拟出类似云的效果,在这里使用了Perlin Noise和Worley Noise两种基础噪声,并使用FBM(Fractal Brownian Motion 分形布朗运动)的方法进行混合。以下我们仅讨论这些噪声的二维形式,三维噪声只需要在采样和插值函数上做出一些改变即可
Perlin Noise
Perlin噪声是一种网格噪声,通过对网格点进行插值来表示
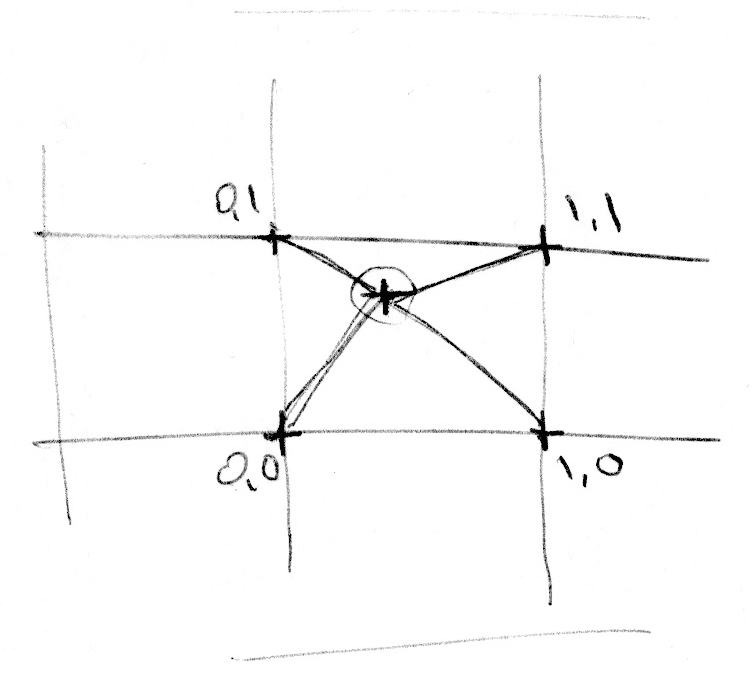
如上图所示,平面被划分为若干个网格,每个网格节点(比如图中0,1的点)存储了一个随机值。对于该网格覆盖范围中任意一点的噪声值,可以被表示为周围四个网格节点中存储随机值的插值,该插值算法不一定是双线性插值,也可以使用别的插值函数。
可以使用一个哈希函数来代表网格节点中存储的随机值,记为hash(x, y),有
PerlinNoise(x, y) = Interpolate(
hash(floor(x), floor(y)),
hash(floor(x)+1, floor(y)),
hash(floor(x), floor(y)+1),
hash(floor(x)+1, floor(y)+1)
)
Worley Noise
Worley噪声同样是一种网格噪声,与Perlin噪声不同的是,它在每个网格内部保存一个随机的特征点,如下图
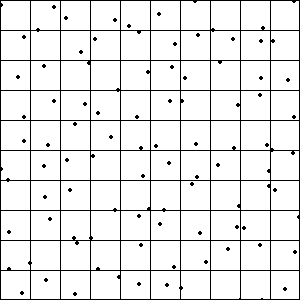
对于二维平面上任意一点的噪声值,表示为到最近的特征点的距离
WorleyNoise(x, y)
{
for each adjacent cells:
min_dis = min(min_dis, dist(current_point, point_in_adjacent_cell));
return min_dis;
}
FBM
FBM分型布朗运动,是通过多个不同频率的噪声加权求和做出来的效果,如
WorleyFBM =
0.625 * WorleyNoise(freq=4) +
0.25 * WorleyNoise(freq=8) +
0.125 * WorleyNoise(freq=16)
噪声采样
通过预先计算并保存上述的噪声,我们得到若干个3D纹理,接下来需要利用这些噪声纹理构造采样函数。参照代码中sample_cloud_density这个函数,我使用了三个系数:base_cloud用于采样FBM噪声,edge_fade_factor用于在边界构造渐变效果,bound_soften用于在云层的上下边界模拟羽化
体积云渲染
得到描述云密度的函数后,我们可以通过Ray Marching光线步进的方法,来计算直射光穿过云层的效果
Ray Marching
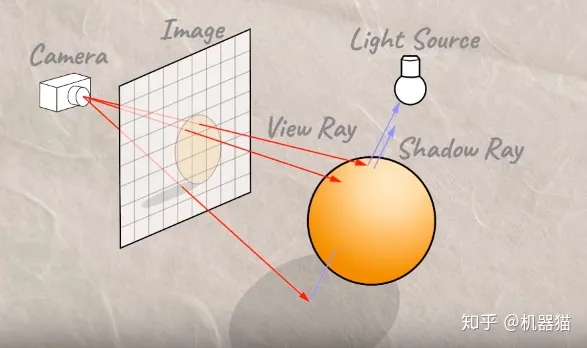
如上图所示,对于图片中的每个像素,我们构造出ViewRay向量,并在该方向上不断步进,计算直射光的穿透效果
float3 view_ray;
float3 start_position;
float step_length;
float total_light_energy = 0;
for(int step = 0; step < MAX_STEP; step++)
{
float3 current_position = start_position + step * step_length;
total_light_energy += get_light_energy(current_position);
}
return total_light_energy + BACKGROUND_COLOR;
光照模型
Ray Marching的计算可以用下图来表示,c表示相机,p表示片元,有一个点光源进行照明(在天光系统中光源则是一个方向固定的直射光)
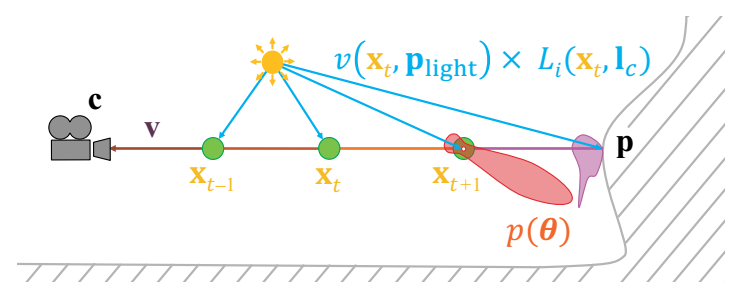
其中LightFunc函数会根据采样点和摄像机的位置,采样云层密度并计算出光照效果
其主要包括两种函数的乘积:
- 朗伯比尔定律(Lambert-Beer law),描述光穿过云层的衰减系数,这里使用了Beer函数和BeerPowder函数
- Henyey-Greenstein Phase Function,描述直射光经过粒子(云中的小水滴)散射后,指向视线方向的概率
LightFunc(c, c-vt) =
SunLight *
BeerPowder(CloudThickness(distance from (c-vt) to sun_dir)) *
PhaseFunction *
Beer(CloudThickness(c, c-vt))
参考资料
《Real-Time Rendering 4th》 Chapter 14
GPU Pro 7: Real-Time Volumetric Cloudscapes